行人检测与识别根据分类方法的不同,可以分为以下三种:(1)形变部件模型变体;(2)基于决策森林的行人检测方法;(3)基于深度学习的行人检测方法。近年来,这三种方法在公开的数据集上都能取得不错的实验结果。但是,传统的行人检测方法(例如方向梯度直方图、局部二值模式等方法)严重依赖于手工设计特征,同时,设计得到的特征维度较高,在实际应用中泛化性能较差。基于深度学习(卷积神经网络)的行人检测方法能够自动从图像中学习得到行人特征,相比于传统的方法,具有更好的泛化性能,且性能也大幅度提升,因此成了当下计算机视觉的研究热点之一。 另外近年来,各类车企推出了很多了自带智能行车记录仪的车型,此类车型具备智能识别路上的行人,可以有效的避免车祸的发生。随着社会的高速发展,以后汽车将成为家家户户的必备出行工具,所以具备针对性的采用行人检测识别算法在行车记录仪中集成使用,提高行车记录仪的智能识别行人效率及速度,给司机驾驶带来方便具有较大的实际应用意义。
一、程序设计
正常情况下,基于深度学习的行人检测大体分为5个步骤: 第一步:输入训练图片; 第二步:利用深度学习模型(例如:选择性搜索模型)圈定行人的区域; 第三步:将圈定的行人区域进行缩放,调整为特定的大小; 第四步:利用卷积神经网络从圈定的区域提取特征; 第五步:利用分类器(线性或者非线性分类器)对提取的特征进行分类。 上述的5个步骤具体如图所示。 
二、效果实现
行人检测
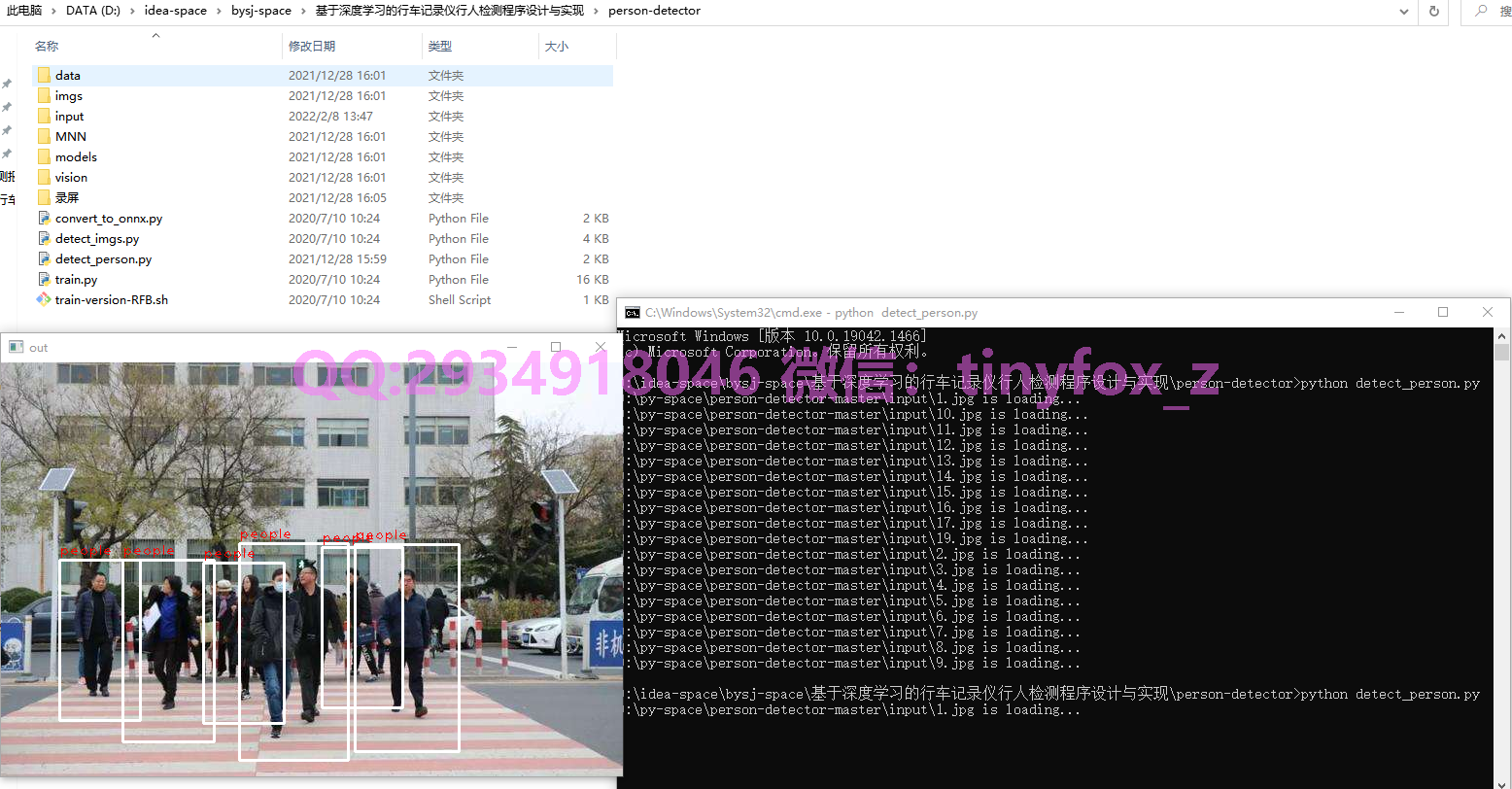 其他效果省略
其他效果省略
三、算法实验
本次毕设系统在设计中实验环境如下:CPU:Intel Core i5-7800K;内存:32G DDR4;GPU:NVIDIA GeForce GTX 1080;操作系统:64位Ubuntu 16.04 LTS;实验框架为TensorFlow;数据集选取PASCAL VOL和INRIA行人数据集的混合数据集。在该实验环境下,本文提出的方法可以在1080p的MP4视频上,可以达到32.3帧/秒。 本文使用每张图片的漏检率(False Positive per Image, FPPI)和漏检率(Miss Rate, MR)作为模型性能好坏的评价标准,并且用ROC曲线进行更加直观的展示。因此,FPPI-MR的数值越小,表明本文提出的模型性能更好。漏检率和每张图片的误检率的公式如下所示: (4.7) MR=FR/(FN+TP) (4.8) FPPI=FP/N 其中,FN表示实际上是行人,但是被误判为非行人的数目;TP表示实际上为行人,被正确判定为行人的数目;FP表示实际上是非行人,但是被误判为行人的数目;N是测试集图片的数目。
