近些年来,随着我国综合国力的迅速发展,国家在经济建设,工业发展领域,科技创新领域都取得了较大的成绩。但是在各行业都取得重大成绩的同时,也带带来了一个急需要解决的问题。垃圾自动分类回收问题,大量的工业垃圾,居民生活垃圾,纸质垃圾,湿垃圾,可回收垃圾等,这些都给现阶段人力分类回收带来了巨大的困难。另外,其中有些垃圾可能还存在着一定的危害性,有毒或者针对花草树木有害等等,因此更加需要出台一种识别率高,且识别效率高,操作方便的垃圾分类回收平台软件,采用机器人代替人工处理的方式去解决垃圾回收分类问题。目前,国内仍然是采用人工收集垃圾,人工分类的方式,在垃圾回收分类行业中投入了大量的人工劳动力,这针对和谐社会智能化数字化发展存在一定滞后性,所以需要在传统垃圾收集分类的方式加以革新。 设计一个基于深度学习的生活垃圾分类机器人软件系统,针对现实社会中产生的垃圾照片进行自动识别分类,对不同类别的垃圾,干垃圾,湿垃圾,可回收垃圾,有害垃圾等进行分类统计处理,减轻人工针对垃圾分类的工作量,提高垃圾分类的效率。
一、程序设计
本基于深度学习的生活垃圾分类机器人软件,系统基础建设功能是垃圾的收集分类,因此需要针对垃圾数据的同图片采集的方式通过深度学习训练垃圾识别模型,进而实现从不同垃圾图片样本中识别垃圾种类。因此在针对垃圾数据识别训练之前,需要准备训练使用的样本数据图片集合,此部分采用网络爬虫的技术手段收集互联网中存在的垃圾图片样本,进行归类整理。垃圾数据图片收集的爬取过程逻辑,具体如图所示。 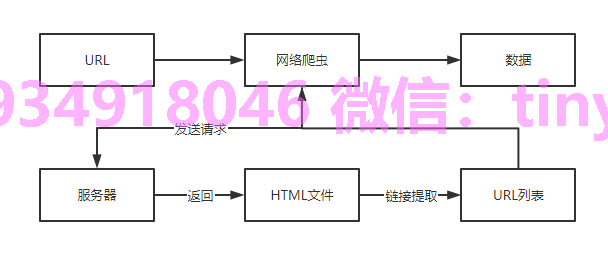
二、效果实现
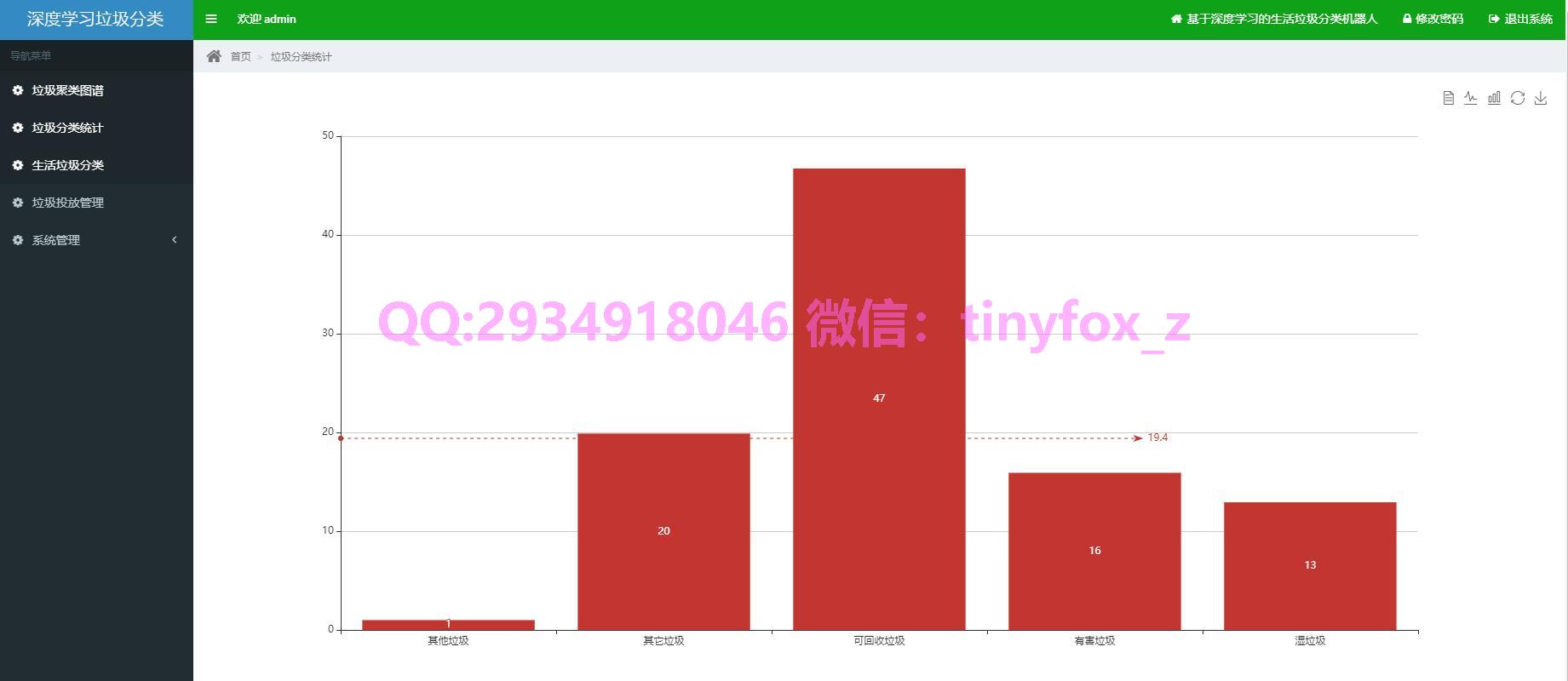
分类统计
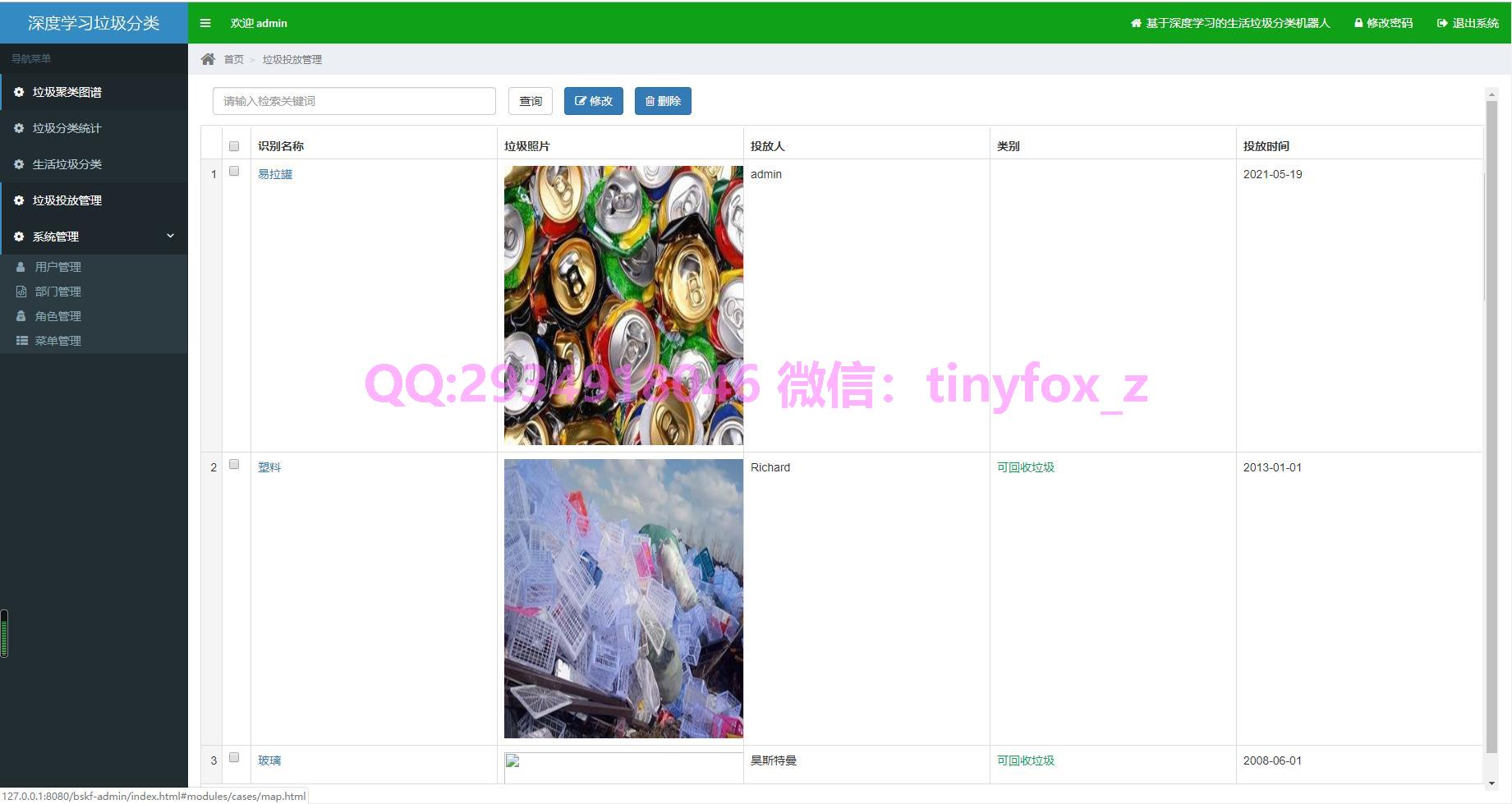
垃圾管理
垃圾识别
 其他效果省略
其他效果省略
三、算法实验
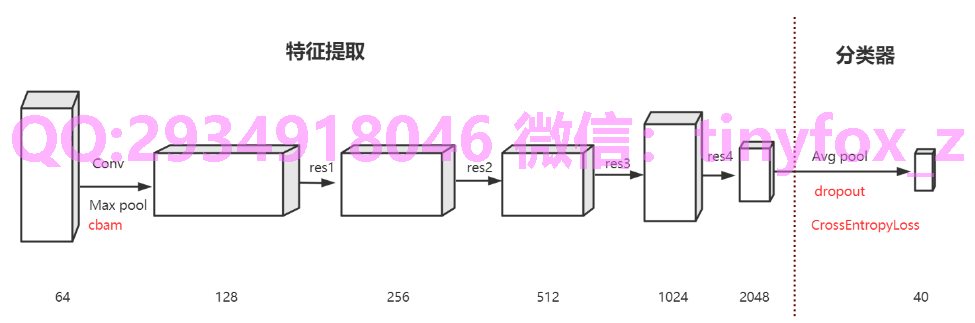
本次毕设系统在设计中,主要采用ResNext101_32x16d_WSL网络作为基本的网络结构进行迁移学习,将CBAM注意力机制模块添加在首层卷积层,来增强图像特征表征能力,关注图像的重要特征抑制不必要的特征,固定除全连接层之外的其他层的权重。为降低过拟合,在模型全连接层添加了Dropout层,损失函数采用交叉熵损失函数,优化函数对比了SGD和Adam,Adam在起始收敛速度快,但最终SGD精度高,所以采用了SGD。最终模型结构如图所示。