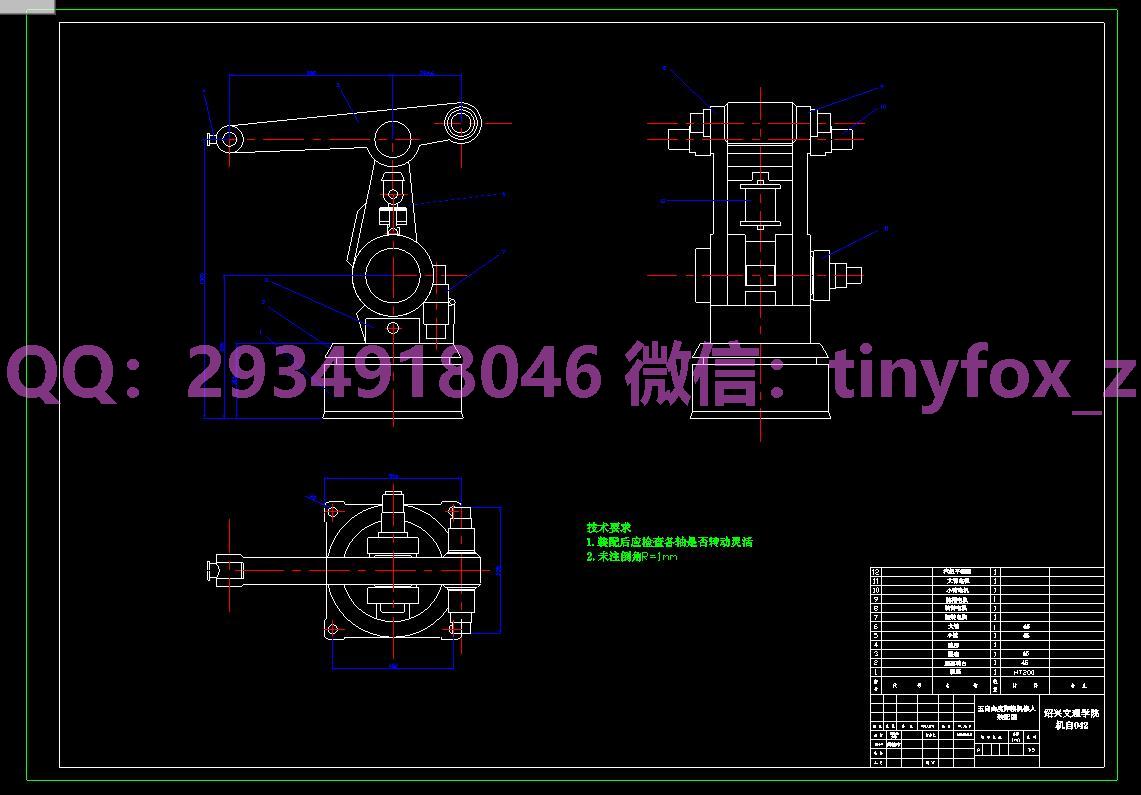
据不完全统计,全世界在役的工业机器人中大约有将近一半的工业机器人用于各种形式的焊接加工领域,焊接机器人应用中最普遍的主要有两种方式,即点焊和电弧焊。我们所说的焊接机器人其实就是在焊接生产领域代替焊工从事焊接任务的工业机器人。这些焊接机器人中有的是为某种焊接方式专门设计的,而大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务,因此,从某种意义上来说,工业机器人的发展历史就是焊接机器人的发展历史。 众所周知,焊接加工一方面要求焊工要有熟练的操作技能、丰富的实践经验、稳定的焊接水平;另一方面,焊接又是一种劳动条件差、烟尘多、热辐射大、危险性高的工作。工业机器人的出现使人们自然而然首先想到用它代替人的手工焊接,减轻焊工的劳动强度,同时也可以保证焊接质量和提高焊接效率。 本次我所设计的机器人为五自由度弧焊机器人。本说明书对本次设计的主要考虑内容进行了叙述和讲解,包括机器人的总体设计以及传动系统的构成与设计,电动机的选择,圆锥齿轮的设计与校核,谐波减速器的原理以及选择,腕部转动轴的校核,齿形带规格的选择以及滚动轴承的选择与校核等。 由于设计经验不足以及理论知识的匮乏,本次设计肯定存在许多不足之处,望答辩老师谅解并不吝赐教。
一、论文目录
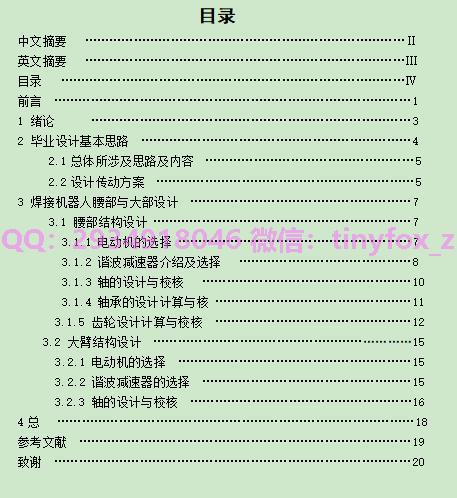
中文摘要 ……………………………………………………………………Ⅱ 英文摘要 ……………………………………………………………………Ⅲ 目录 …………………………………………………………………………Ⅳ 前言 ……………………………………………………………………………1 1 绪论 ……………………………………………………………………3 2 毕业设计基本思路 …………………………………………………………4
2.1总体所涉及思路及内容 ……………………………………………5 2.2设计传动方案 ………………………………………………………5
3 焊接机器人腰部与大部设计 ………………………………………………7 3.1 腰部结构设计 ………………………………………………………7 3.1.1 电动机的选择 …………………………………………………7 3.1.2 谐波减速器介绍及选择 ……………………………………8 3.1.3 轴的设计与校核 ……………………………………………10 3.1.4 轴承的设计计算与核 …………………………………………11 3.1.5 齿轮设计计算与校核 …………………………………………12 3.2 大臂结构设计 ………………………………………………………15 3.2.1 电动机的选择 …………………………………………………15 3.2.2 谐波减速器的选择 ……………………………………………15 3.2.3 轴的设计与校核 ………………………………………………16 4总 ……………………………………………………………………………18 参考文献 ………………………………………………………………………19 致谢 ……………………………………………………………………………20
二、论文截图
图片